- HOME
- トピックス一覧(プレスリリース)
- トピックス詳細(プレスリリース)
トピックス詳細(プレスリリース)
東京都市大学
東京都市大学(東京都世田谷区、学長:三木 千壽)工学部 機械システム工学科の関口 和真 講師ら研究チームは、自律飛行ドローンの運動性能を向上させ、大きな姿勢変化を行っても、安全に飛行できる制御システムを実現する、新しいアルゴリズムを開発しました。
このアルゴリズムにより、自律飛行ドローンの運動性能が向上するだけでなく、突発的な飛来物への対応や、他の自律飛行ドローンと連動しながらドローン群を形成するなどの能力拡張が可能となり、将来的には、自動制御による農作物の育成や被災地の現場調査への活用など、不足する労働力を代替することが期待されます。
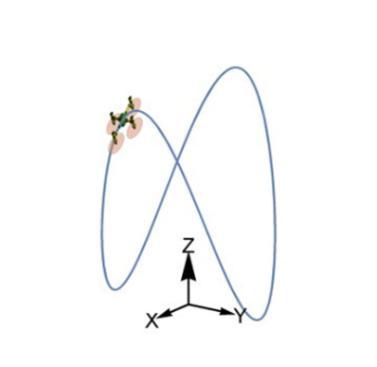
図1:新しいアルゴリズムによって実現するドローンの動き
鞍型の目標経路(60 x 60 x 40 mのサイズ)に対し、
反転運動を伴いながら経路どおりの飛行を実現
本研究のポイント
概要
このたび、関口講師ら研究チームは、推力の相互干渉を含めても、理論通りに飛行できる自動制御システムを実現する新しいアルゴリズムを開発しました。このアルゴリズムは、これまで制御システムの入力に反映できなかった非線形なドローンの動きを、制御しやすい線形とするために、視点(座標)を合わせて変換することで実現しました。(図2)
私たちを取りまく多くの機械システムは、非線形な性質を持つことから、正確に制御するためには、この性質を理解し、制御システムへ入力することが必要です。しかし、現実的には、扱いやすさを優先するため、近似値をとって線形化し、入力することも少なくありません。こうしてできた制御システムは、精度に欠けるため、ドローンにおいては、複数のプロペラによる推力が相互に干渉し、理論とは異なる動きになる場合がありました。このため、安全確保を目的に姿勢の傾きには限度が設けられ、ドローンが複雑な動きをすることを妨げていました。
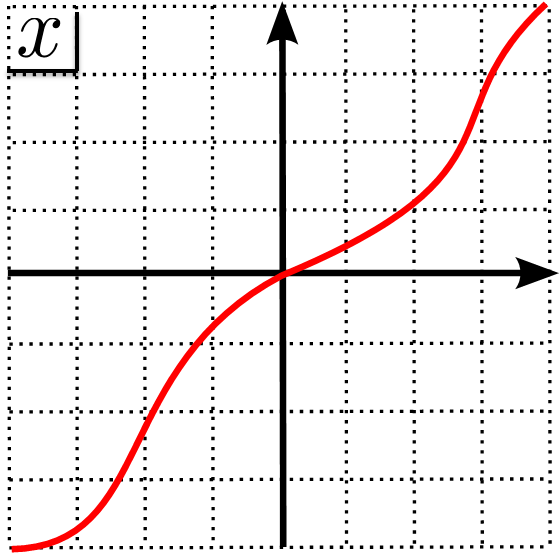
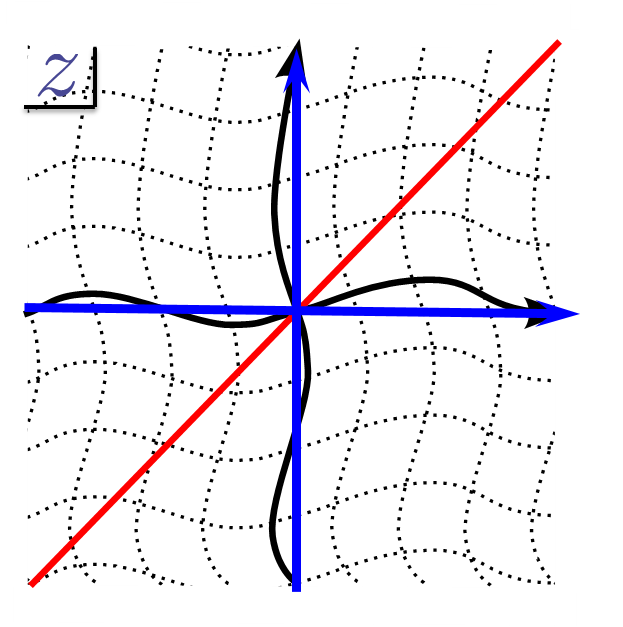
図2:非線形(左)を線形(右)へ視点変換するイメージ
研究の背景
現在、ドローンの活用に向け、様々な取り組み・法整備が行われていますが、多くは人間による操縦を前提としています。一方、少子高齢化による労働人口の減少を背景に、複数のドローンを用いた大規模な運用は操縦者の確保という観点から難しい状況にあります。
また現在、実用化が進んでいるドローンの自動操縦は、事前の最適化計算によって飛行すべき経路を綿密に設計し、その経路上を飛行するというものです。一方で、インフラメンテナンスや農薬散布、作物の生育状況の監視など、今後ドローンの活用が求められる分野では、鳥が舞い込んでくるなど突発的事態へ臨機応変に対応する必要があります。
今後の展開
今後は、数値シミュレーションで構築してきた理論を実証するため、5年以内に実機による試験を行います。現在は、今回開発したアルゴリズムの実装に必要なドローンの状態(位置、姿勢、速度など)や物理的数値(ドローンの重さや回転に関する値など)を得るためのシステム開発に着手しています。
また、今回開発したアルゴリズムにより、様々な制御理論が適用可能となります。例えば、「障害物回避手法(※3)」を用いれば、これまでドローンが苦手としている動的環境(鳥が舞い込むなど)に、柔軟に対応することができます。
また、分散制御(※4)と組み合わせることも可能で、個々のドローンが自律的に動き回りながら、群れの中で役割を持って行動するドローン群を実現させることも可能となります。

図3:3台での分散制御実験の様子
用語解説
※1 非線形:線形(※2)以外で表現される関係を表す学術用語。
※2 線形:一次関数(直線)で表現される関係を表す学術用語。
※3 障害物回避手法:障害物を回避するための制御理論。
※4 分散制御:システムをいくつかの部分システムに分割して、部分システムが個々に独立して行動しながら協調作業を実現する制御方式。